Beitrag im Big Data Insider zu Simultaneous Localization and Mapping
Wirtschaftlichen Hürden mit Flottendaten begegnen
Die jambitees Dominik Jain und Julian Schauseil zeigen im Magazin Big Data Insider, wie Simultaneous Localization and Mapping (SLAM), ein Verfahren aus der Robotik, autonomes Fahren unterstützt.
Der KI-Usecase beschreibt ein wichtiges Problem für Automobilhersteller, das bei der Realisierung des autonomen Fahrens aufkommt. Dominik Jain und Julian Schauseil arbeiten bei jambit in der Business Division New Business und konzentrieren sich auf Anwendungen im Bereich künstliche Intelligenz: Von Geoanalytics über Geschäftsoptimierung bis hin zu intelligenten Assistenten.
KI und autonomes Fahren braucht verlässliche Daten zur Routenführung. Gar nicht so einfach, denn unsere Welt unterliegt einem stetigen Wandel. Dies gilt im Besonderen für unser Straßennetz, welches aufgrund von Neubau, Umbau oder temporären Umstellungen sowohl topologischen als auch geometrischen Änderungen unterliegt.
Kartenanbieter vermessen das Straßennetz über spezielle Messfahrzeuge, die mit hochgenauer Sensorik spurgenaue Straßenverläufe und relevante Umgebungselemente wie Straßenschilder unmittelbar kartieren können. Ein flächendeckender, permanenter Einsatz solcher Fahrzeuge ist jedoch nicht praktikabel, weshalb Straßenkarten bereits am Tag ihrer Veröffentlichung veraltet sind.
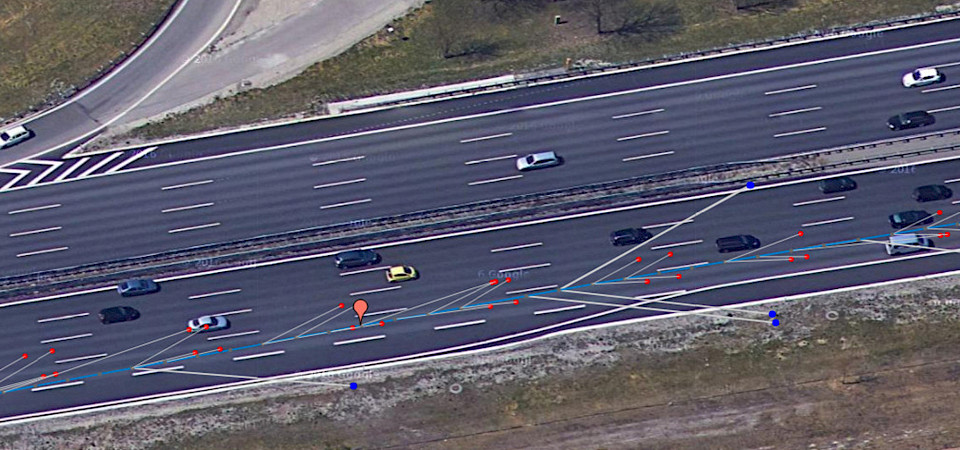
Eine Alternative bietet die Einbeziehung der Fahrzeugflotten. Über Kameras und entsprechende Bildverarbeitungskomponenten nehmen aktuelle Fahrzeugmodelle z. B. Fahrbahnmarkierungen und -begrenzungen, Straßenschilder und Pfosten wahr. Zudem verfügen sie über GPS-Sensoren und Odometrie oder Dynamikdaten für absolute bzw. relative Lokalisierung.
Die Qualität einzelner Messungen ist dabei aber nicht vergleichbar mit der eines Messfahrzeugs. Das liegt zum einen am generell begrenzten Blickwinkel und der Unfähigkeit, die Umgebung komplett zu erkunden, und zum anderen an teilweise eingeschränkter Sicht durch andere Fahrzeuge.
Mit Investitionen in Entwicklungsleistungen für künstliche Intelligenz das autonome Fahren schneller realisieren
Durch die Kombination vieler noch ungenauer und unvollständiger Daten kann man jedoch, wie Jain und Schauseil im Beitrag im Big Data Insider aufzeigen, ein konsistentes, hochgenaues und aktuelles Bild der Welt erhalten. Einen Ansatz bietet das Verfahren SLAM.
Wie kann eine Umgebung kartiert werden, in der man sich bewegt und die über Sensoren wahrgenommen wird, jedoch ohne sich in dieser Umgebung lokalisieren zu können? Zum Kartierungsproblem kommt ein simultanes Lokalisierungsproblem hinzu. In ihrem Artikel kommen sie zu dem Schluss, dass neben der zunehmend besser werdenden Sensorik, auch die „algorithmische Trickkiste“ viele Potenziale für Herausforderungen der Zukunft bietet.
Denn zum aktuellen Zeitpunkt ist verbesserte Sensorik für Serienfahrzeuge oft noch eine Kostenfrage. Investitionen in Entwicklungsbudgets für künstliche Intelligenz bieten damit eine wertvolle Chance für die Automobilindustrie, autonomes Fahren hinsichtlich technischer Aspekte schneller zu realisieren.
Lesen Sie den Artikel im Big Data Insider
Sie möchten einen breiteren Überblick über unsere Leistungen, auch über KI und autonomes Fahren hinaus, gewinnen? In unserem KI-Leistungsportfolio zeigen wir, welche KI-Anwendungsbereiche wir für unsere Kund*innen begleiten.