Bereitstellung der Service Platform Retail für den VW-Konzern

Eingesetzte Methoden aus dem Bereich künstliche Intelligenz: Graph-SLAM, kombinatorische Optimierung, Clustering, probabilistische Modellierung
Eingesetzte Technologien: Java, g2o (General Graph Optimization Library), Apache Accumulo, JavaScript, Google Maps
Zeitrahmen des Projekts: 04/2016 bis 03/2018
Als Dienstleister für individuelle Softwarelösungen begleitet jambit seit vielen Jahren Entwicklungen im Bereich künstliche Intelligenz, speziell im Bereich Geoanalytics und digitale Karten. Bereits im Jahr 2015 begann jambit, im Auftrag von BMW, Fahrzeugdaten mit Ortsbezug zu analysieren, gegen existierende Karten abzugleichen, und mit Hilfe von Modellen neue Erkenntnisse über das Straßennetz zu gewinnen, welche in Zukunft in aktualisierte digitale Karten einfließen können.
Aktuellem Kartenmaterial kommt im Zuge der zunehmenden Digitalisierung des Fahrens eine immer größer werdende Bedeutung zu. Im autonomen Fahren ab Stufe 3, dem hochautomatisierten Fahren, fahren die Fahrzeuge bereits selbstständig, wobei sie sich nicht nur auf ihre Sensorik, sondern auch auf hochgenaue Karten verlassen. Aktuelle Karten sind daher die Voraussetzung für die Freigabe von Strecken für das hochautomatisierte und autonome Fahren. Diejenigen Fahrzeughersteller, die ihre Fahrzeuge mit aktuelleren Karten versorgen können, sind daher auch in der Lage, in einem größeren Gebiet hochautomatisierte Fahrfunktionen anzubieten zu können, was einen direkten Wettbewerbsvorteil darstellen kann.
Kommerzielle Kartenanbieter vermessen das Straßennetz über spezielle Messfahrzeuge. Ein flächendeckender, permanenter Einsatz solcher Fahrzeuge ist jedoch nicht praktikabel, weshalb Straßenkarten bereits am Tag ihrer Veröffentlichung veraltet sind. BMWs aktuelle Fahrzeugmodelle nehmen jedoch bereits über Kameras und entsprechende Bildverarbeitungskomponenten z. B. Fahrbahnmarkierungen und -begrenzungen, Straßenschilder und Pfosten wahr. Zudem verfügen sie über GPS-Sensoren und Odometrie- oder Dynamikdaten für absolute bzw. relative Lokalisierung. Daher stellte sich uns im Forschungsprojekt die Frage, inwieweit die Daten vieler solcher Serienfahrzeuge für die Kartierung genutzt werden könnten.
Die Qualität einzelner Messungen ist bei einem Serienfahrzeug eine andere als bei einem hochspezialisierten Messfahrzeug und alle Messungen unterliegen gewissen Messfehlern. Außerdem sieht jedes Fahrzeug seine aktuelle Umgebung meist unvollständig, da der Blickwinkel eingeschränkt ist und andere Fahrzeuge ihm die Sicht nehmen können. Mit ungenauen Selbstlokalisierungsmechanismen und ungenauen Messungen der Positionen von Objekten relativ zum Fahrzeug ist auch nicht mehr klar, ob sich je zwei Messungen auf das gleiche oder auf unterschiedliche Objekte beziehen (Datenassoziationsproblem). A priori wissen wir auch nicht einmal, welche Objekte überhaupt existieren und also kartiert werden sollten.
Diesen Herausforderungen stellte sich das Team von jambit im Projekt HAF Learning Map, um insbesondere Fahrspurverläufe und -begrenzungslinien sowie Schilder und Pfosten zu kartieren. Über die Nutzung der Daten vieler Fahrzeuge, die denselben Streckenabschnitt traversierten, können die obigen Probleme – unter Einsatz von Methoden der künstlichen Intelligenz und des maschinellen Lernens – lösbar werden.
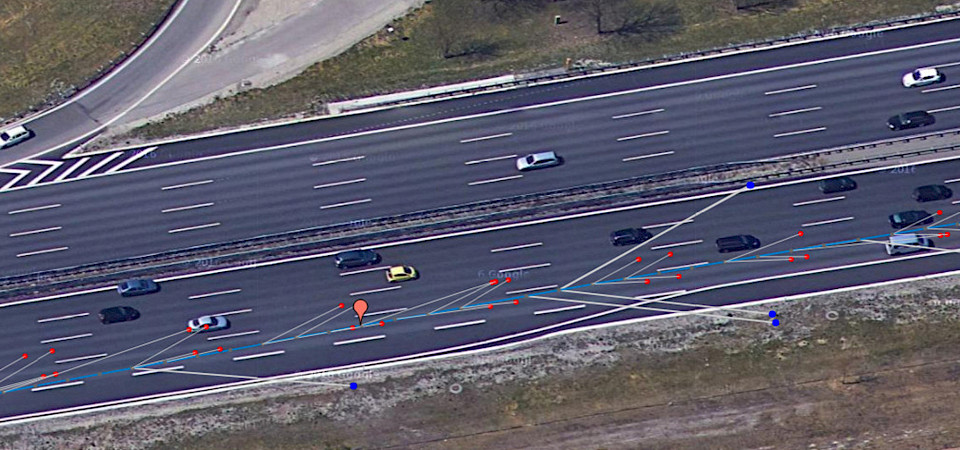
Als Methode zur Konsolidierung von ungenauen Sensordaten wurde Graph-SLAM eingesetzt, wobei SLAM (simultaneous localization and mapping) eine aus der Robotik bekannte Herangehensweise ist. Im Graph-basierten Fall wird das Kartierungsproblem auf ein probabilistisches Schlussfolgerungsproblem in einem Faktor-Graphen reduziert, wozu alle Sensorwahrnehmung geeignet probabilistisch modelliert werden müssen. Bevor ein zu lösendes Graph-SLAM-Problem jedoch überhaupt formuliert werden kann, muss das Datenassoziationsproblem gelöst werden. jambit entwickelte dazu einen mehrstufigen Prozess, der das Graph-SLAM-Problem inkrementell aufbaut: Erkenntnisse aus vorangehenden Optimierungsschritten werden genutzt, um neue zu kartierende Objekte zu erkennen und ihnen die richtigen Sensorwahrnehmungen zuzuordnen. Insbesondere für die Kartierung der Fahrspurverläufe war es notwendig, ein hartes kombinatorisches Optimierungsproblem zu lösen, da weder die Anzahl der Spuren noch Änderungen in der Fahrspurkonfiguration im Verlauf der zu kartierenden Strecke zuvor bekannt waren.
jambit war im Projekt verantwortlich für die Konzeption, die Entwicklung, die Validierung sowie die wissenschaftliche Dokumentation aller Algorithmen. Details zum entwickelten Verfahren können in unserem Beitrag zum IEEE Intelligent Vehicles Symposium 2019 nachgelesen werden.

Jetzt herunterladen: jambit Innovation Story "Hochautomatisiertes Fahren (HAF) Learning Map"
Für Fragen steht Ihnen Frank Strobl, Head of Competence Center Business Development, gern zur Verfügung. Hinterlassen Sie ihm einfach eine Nachricht über das Kontaktformular.

Kontakt aufnehmen