

Article in Big Data Insider on simultaneous localization and mapping
Meeting economic challenges with fleet data
In the magazine Big Data Insider, our jambitees Dominik Jain and Julian Schauseil show how Simultaneous Localization and Mapping (SLAM), a method from robotics, supports autonomous driving.
The AI use case describes an important problem for car manufacturers, which arises during the realization of autonomous driving. Dominik Jain and Julian Schauseil concentrate on applications in the field of artificial intelligence: from geo-analytics to predictive analytics to intelligent assistants.
AI and Autonomous driving needs reliable data for routing. It's not so easy in a constantly changing world. This is especially true for our road network, which is subject to both topological and geometric changes due to new construction, reconstruction, or temporary changes.
Map providers survey the road network using special measuring vehicles. Using high-precision sensor technology, they can map roads lane by lane and relevant environmental elements such as road signs directly. However, a comprehensive, permanent use of such vehicles isn't practicable, which is why road maps are already outdated on the day they are published.
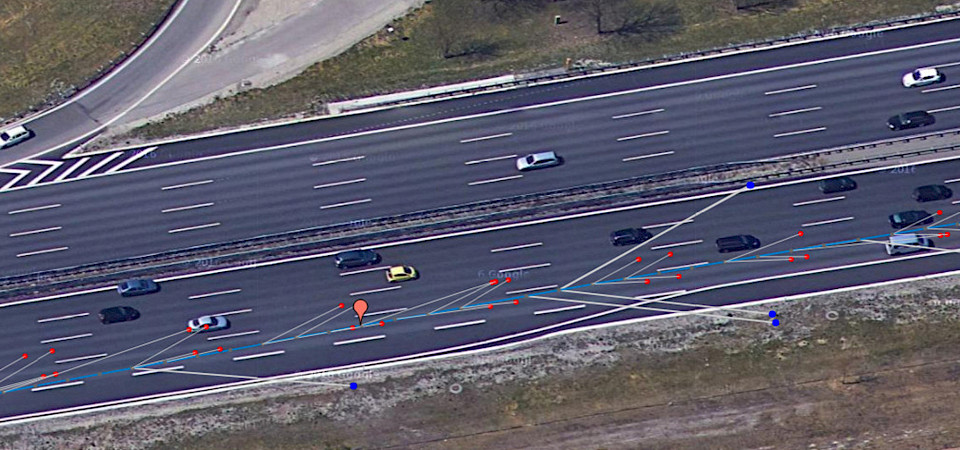
An alternative is the inclusion of vehicle fleets. Using cameras and corresponding image processing components, current vehicle models recognize, for example, road markings and edge lines, road signs and posts. They also have GPS sensors and odometry or dynamic data for absolute or relative localization.
However, the quality of individual measurements isn't comparable to the qualitiy of a measurement vehicle. This is partly due to the generally limited viewing angle and the inability to completely explore the environment, and partly due to other vehicles on the road blocking the view.
Realizing autonomous driving faster with investments in development services for artificial intelligence
As Jain and Schauseil point out in their article in Big Data Insider, it is possible to obtain a consistent, highly accurate and up-to-date picture of the world by combining a lot of still inaccurate and incomplete data. One approach is offered by the SLAM method.
How can an environment be mapped in which one moves and which is perceived by sensors, but without exactly localizing oneself in this environment? In addition to the mapping problem, there is a simultaneous localization problem. In their article, they conclude that, in addition to the ever-improving sensor technology, the "algorithmic bag of tricks" also offers many potentials for future challenges.
Because still today, improved sensor technology for series vehicles is often a cost issue. Investments in development budgets for artificial intelligence offer a valuable opportunity for the automotive industry to implement autonomous driving more quickly with regard to technical aspects.
Read the article in Big Data Insider (German).
You want to have a better overview of our services in the automotive industry? Take a look at our AI service portfolio where we show the AI application areas that we support for our clients.
